On February 16, the “Maintenance and Inspection Robot of Generator without Extracting the Generator Rotor” independently developed by CNOC joined with Institute of Optics and Electronics, Chinese Academy of Sciences, was applied for the first time, completed the full range video inspection of generator stator and rotor slot successfully at the outage site of Fujian Ningde Nuclear Power Unit.
The Image of the robot entering the generator
On that day, at the outage site of Fujian Ningde Nuclear Power Unit, the robot slowly entered the generator along the air gap between the stator and rotor, and on the display screen connected to the robot at the other end, a clear image inside the generator was displayed in real time.
From 0 to 7.5 meters (full length of generator stator core), this is the traveling distance which the robot has travelled for the first time. This seems to be a short distance, but it means that CGN has taken an important step in the innovation of nuclear power generator maintenance technique.
The robot checks the generator rotor coil
Every five years or so, the Nuclear Power Plant needs to carry out a comprehensive maintenance and test on the generator, which needs to remove a large number of equipment such as exciter in advance. At the same time, the rotor, an important part of the generator, weighs 233 tons and is 15.38 meters long, Rotor extraction operation demands high technical capability and coordination of lifting operation. In this process, once the equipment is damaged, it may cause hundreds of millions of economic losses.
Operation site of generator rotor extraction
In recent years, CGN has continuously improved the maintenance efficiency by optimizing maintenance window and developing defect contingency plan, and the safety and quality of generator maintenance operation has been continuously guaranteed and improved. But the innovation of rotor extraction operation is still the key direction of generator maintenance.
After repeated research and demonstration, the generator maintenance team came up with the idea of using the robot to enter the generator to complete the test and maintenance without pulling the rotor.
The idea soon came to the ground. In 2018, the research project of generator maintenance robot without rotor extraction was officially established and implemented. After more than 2 years of intensive research, after overcoming the difficulties of that the generator internal space is too small to move, the function of a single robot is insufficient, and there are many sensors with complex structure, the Maintenance and Inspection Robot of Generator without Extracting the Generator Rotor finally emerges.
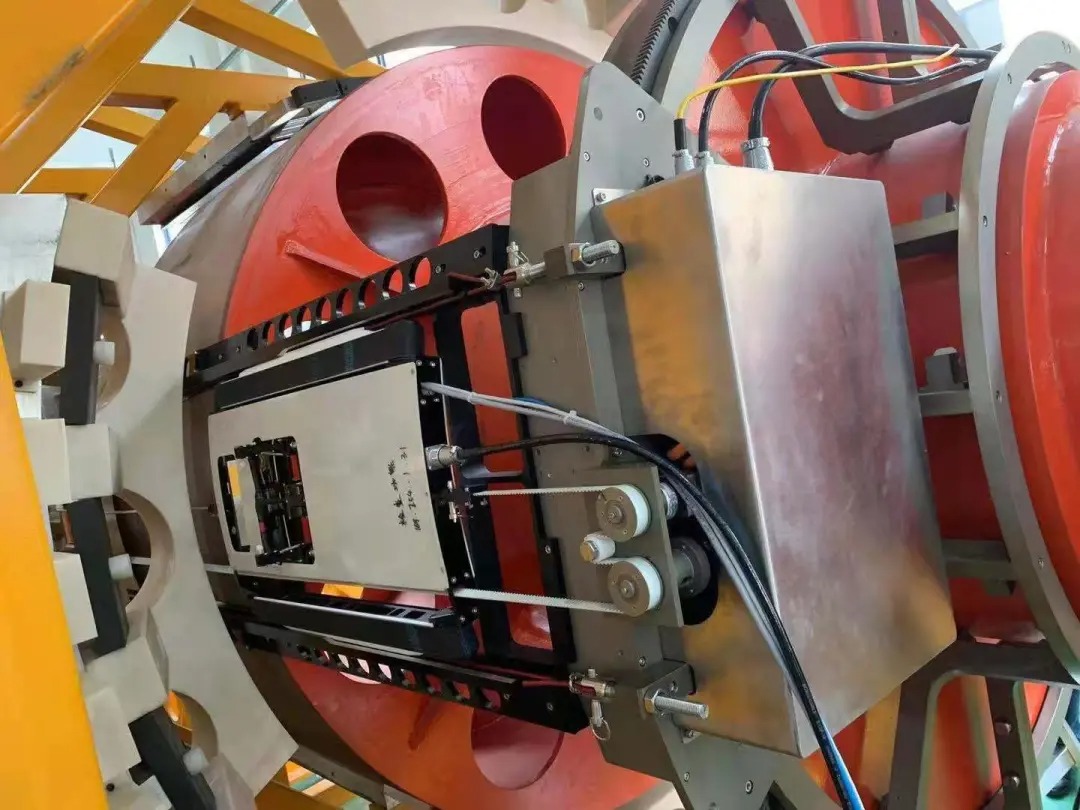
Compared with the huge generator, this “Petite” robot body is like a thin building block, composed of multiple cameras, instrument probes, knockers and various sensors. After entering the 4.5cm high annular air gap of the generator stator by magnetic suction, the robot can complete visual inspection, cleaning and maintenance, electrical test and other work. Moreover, the circular guide can also make the robot rotate 360 degrees around the rotor along the air gap to check without dead angle.
The robot in the stage of experimental research and development is working in a simulated environment
Compared with the traditional maintenance methods, the maintenance personnel can control the position of the robot through the software, so that the robot can automatically perform the operation according to the pre-configured path. The maintenance personnel only need to observe the maintenance results on the external display.
.jpg)
The results of generator maintenance will be reflected in the display screen
At present, the robot can achieve 11 maintenance items, which can complete all items that can be checked only by extracting the rotor. Compared with the similar robots abroad, it also adds such functions as surface cleaning, resonance frequency test, intelligent identification and fault handling, fills the domestic gaps, and realizes the technical guidance of CGN in generator maintenance robot field.
According to the calculation, after the robot realizes the full function application, it can save about 5 days and about 1100 days of person day for the critical path maintenance period of conventional island in the outage. At present, 26 patents have been applied and 17 of them have been awarded.